SIEMENS广东汕头市西门子变频器、PLC(授权)一级代理商——西门子华南总代理
更新:2024-11-26 07:00 编号:27684357 发布IP:120.229.159.234 浏览:10次









- 发布企业
- 广东湘恒智能科技有限公司商铺
- 认证
- 资质核验:已通过营业执照认证入驻顺企:第1年主体名称:广东湘恒智能科技有限公司组织机构代码:91441304MAC3TWY11U
- 报价
- 请来电询价
- 西门子代理商
- 变频器
- 西门子总代理
- 伺服电机
- 西门子一级代
- 触摸屏
- 关键词
- PLC,变频器,代理商,一级代理,伺服电机
- 所在地
- 惠州大亚湾澳头石化大道中480号太东天地花园2栋二单元9层01号房
- 联系电话
- 15903418770
- 手机
- 15915421161
- 联系人
- 张经理 请说明来自顺企网,优惠更多
- 请卖家联系我
 15915421161
15915421161

详细介绍
S7-200Smart通过Modbus RTU通信实现V90内部位置控制的MDI功能
SINAMICS V90固件版本1.05以上开始,伺服驱动器提供了Modbus RTU 通信功能。PLC可以通过 Modbus的FC3及FC6功能代码读取或写入伺服驱动的寄存器,S7-200Smart可通过标准的Modbus功能块完成发送伺服驱动器的控制指令及读写驱动的参数。本文详细描述了S-200 SMART PLC通过Modbus RTU 通信连接SINAMICS V90实现内部位置的MDI功能。
目录
1 概述
2 必备条件
2.1 使用的硬件
2.2 使用的软件
2.3 通信连接
3 通过Modbus通信实现V90内部位置控制的MDI功能
3.1 V90 Modbus 寄存器说明
3.2 V90参数设置
3.3 PLC的编程
1 概述
SINAMICS V90固件版本1.05以上开始,伺服驱动器提供了ModbusRTU 通信功能。PLC可以通过 Modbus 的FC3及FC6功能代码读取或写入伺服驱动的寄存器,S7-200Smart可通过标准的Modbus功能块完成发送伺服驱动器的控制指令及读写驱动的参数。本文详细描述了S-200 SMARTPLC 通过Modbus RTU 通信连接SINAMICS V90实现内部位置的MDI功能。
2 必备条件2.1 使用的硬件
使用的硬件如表2-1所示。
序号
设备名称
订货号
1
SIMATIC S7-200 SMART CPU ST60
6ES7288-1ST60-0AA0
2
V90驱动器
6SL3210-5FE10-4UA0(V1.05版本以上)
3
伺服电机
1FL6042-1AF61-0LG1
4
电机及编码器配套电缆
表2-1使用的硬件
2.2 使用的软件
使用的软件如表2-2所示。
序号
描 述
1
Window 7 旗舰版 32位或64位
2
STEP 7-Micro/WIN SMART 编程软件
3
SINAMICS V-ASSISTANT V1.02
表2-2使用的软件
2.3 通信连接
SINAMICSV90 伺服驱动通过 RS485 电缆与 PLC 连接,使用标准 Modbus 通信协议进行通讯。通过ModbusPLC给V90发送伺服使能和停止命令并且可以读取伺服驱动器的状态及故障代码。
SINAMICSV90 伺服驱动通过 RS485 接口(X12)使用 MODBUS 协议与 PLCRS485(端口 0) 进行通讯,接线如图2-1所示。

图2-1 S7-200 SMART CPU 与V90通讯线连接
3 通过Modbus通信实现V90内部位置控制的MDI功能3.1 V90Modbus 寄存器说明
V90内部控制的控制数据寄存器如表3-1所示。
寄存器编号
描述
单位
定标系数
范围
40100
IPOS控制模式控制字
40932/40933
MDI 速度设定值
1000LU/min
1
1至2147482647
40934
MDI 加速度倍率
%
100
0.1 至100
40935
MDI 减速度倍率
%
100
0.1 至100
40102
位置设定值高字
LU
1
-2147482648至
2147482647
40103
位置设定值低字
表3-1 V90的内部位置控制数据寄存器
IPOS控制模式寄存器 40100控制字的定义如表3-2所示。
位
信号
描 述
0
SON_OFF1
通过上升沿使能伺服,=0时驱动通过斜坡函数发生器停车,脉冲被取消
1
OFF2
1:OFF2=1,允许使能
0:OFF2=0,立即取消脉冲
2
OFF3
1:OFF3=1,允许使能
0:OFF3=0,快速停车,脉冲被消除
3
OPER
1:允许运行(脉冲可以被使能)
0:禁止运行(取消脉冲)
4
SETP_ACC
触发上升沿来接收MDI 设定值
5
TRANS_TYPE SE
1:立即接收新的设定值
0:通过触发上升沿来接收新的设定值
6
POS_TYP
1:定位
0:相对定位
7
RESET
复位故障
8
预留
9
预留
10
PLC
使能 PLC 的控制权
11
预留
12
预留
13
SREF
启动回参考点(对于p29240=0,通过REF 信号回参考点)
14
预留
15
预留
表3-2 寄存器 40100控制字的定义
3.2 V90参数设置
按照表3-3设置伺服驱动器的相关参数
参数设置
说明
P29003=1
P29003为内部控制模式
P29303[0]=3
设置DI3为CWL,正限位,连接限位开关为高电平
P29304[0]=4
设置DI4为CCWL,负限位,连接限位开关为高电平
P29004=1
设置SINAMICS V90 的MODBUS站地址为1
P29007=2
设置通信协议为Modbus 协议
P29008=1
选择 Modbus 控制源,设定值和控制字来自于 Modbus PZD
P29009=8
设置传输波特率为38400 波特
表3-3伺服驱动器的相关参数
3.3 PLC的编程
PLC的编程如表3-4所示。
序号
1
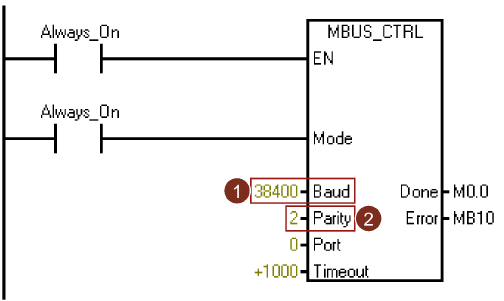
初始化Modbus通信接口,需确保 PLC 的波特率与驱动设置一致,设置 PLC 校验方式为偶校验(parity= 2)。
2
通过寄存器 40100 写入需要的控制字。必须设置寄存器 40100 的位 10 为 1 以允许 PLC 控制驱动。使能驱动器,先将16进制数 40E 写入寄存器 40100 中,再写入 40F)。

3
如果需要对带增量编码器驱动执行回参考点操作,保持驱动为伺服使能状态,可通过写控制字 40100 第13位,执行回参考点操作。
4
通过MBUS_MSG功能块,将位置设定值和速度设定值写入寄存器 40932、40933、40934、40935、40102 和40103 中。

5
MDI相对定位的40100控制寄存器操作:
(1) 在IPos 控制模式中,控制字的位6=0选择相对定位模式(40F)
(2) 控制字的位5=0,设置使用上升沿来接收MDI 设定值(40F)
(3) 将表3-1中的寄存器,写入需要的值 (如40934及40935写入十六进制的4000, 40932/40933写入MDI速度值,40102/40103写入MDI的位置值) 后,通过PLC发送控制字的位4上升沿来接收设定值,驱动进行MDI运行(41F)
MDI定位的40100控制寄存器操作:
(1) 在IPos 控制模式中,控制字的位6=1来选择定位模式(44F)
(2) MDI设定值的生效有两种:
MDI设定值立即生效:控制字的位5=1,设置接收的MDI设定值立即生效(46F);
上升沿来接收MDI 设定值:控制字的位5=0,设置使用上升沿来接收MDI 设定值(44F)
(3) 将表3-1中的寄存器写入需要的值 (如40934及40935写入十六进制的4000, 40932/40933写入MDI速度值,40102/40103写入MDI的位置值)后,如果是MDI设定值立即生效,则驱动进行MDI运行。如果是通过上升沿接收MDI设定值,则通过PLC发送控制字的位4的上升沿来接收设定值(45F),驱动进行MDI运行
| 成立日期 | 2022年11月17日 | ||
| 主营产品 | 西门子PLC代理商,plc变频器,伺服电机,人机界面,触摸屏,线缆,DP接头 | ||
| 公司简介 | 广东湘恒智能科技有限公司主要从事工业自动化产品的集成,销售与维修。致力于为您提供在机械、化工、水泥、电力、环保等领域的电气及自动化技术的完整解决方案,包括自动化产品及系统、工程项目执行及管理、主要过程控制领域技术支持,以及专业的售后服务、培训等。公司本着“以人矢志创新、追求卓越”的工作方针,致力于工业自动化控制领域的产品开发、工程配套和系统集成、销售,拥有丰富的自动为本、科技先导、化产品的应用和实 ... | ||
- 调速变频器怎样调快慢参数 变频器调速怎么设定变频器过载故障处理调速变频器怎样调快慢参数调速变频器的调整参数包括基本参数和gaoji参数两部分,... 2024-09-09
- 伺服电机压力机的作用是什么伺服电机压力机是一种采用伺服电机作为动力源的新型压力机,具有高精度、高效率、高稳... 2024-09-09
- 伺服编码器线Zui长多少米接线伺服编码器是一种高精度的测量设备,用于测量伺服电机的旋转角度和速度。在伺服系统中... 2024-09-09
- 夏季高温来了,该如何使用我们的变频器夏季已至,以现在设备控制调速不可缺少的变频器而言,烈日炎炎的天气是变频器发热的硬... 2024-09-09
- 变频器功率 修改方法本文主要介绍变频器功率修改方法,主要介绍常用牌子及其型号,希望对业内人士有所帮助... 2024-09-09
 SIEMENS广东湛江市西门子变频器、PLC(授权)一级代理商——西门子华南总代理西门子代理商:变频器
SIEMENS广东湛江市西门子变频器、PLC(授权)一级代理商——西门子华南总代理西门子代理商:变频器 SIEMENS广东中山市西门子变频器、PLC(授权)一级代理商——西门子华南总代理西门子代理商:变频器
SIEMENS广东中山市西门子变频器、PLC(授权)一级代理商——西门子华南总代理西门子代理商:变频器 SIEMENS广东茂名市西门子变频器、PLC(授权)一级代理商——西门子华南总代理西门子代理商:变频器
SIEMENS广东茂名市西门子变频器、PLC(授权)一级代理商——西门子华南总代理西门子代理商:变频器 SIEMENS广东江门市西门子变频器、PLC(授权)一级代理商——西门子华南总代理西门子代理商:变频器
SIEMENS广东江门市西门子变频器、PLC(授权)一级代理商——西门子华南总代理西门子代理商:变频器 SIEMENS广东珠海市西门子变频器、PLC(授权)一级代理商——西门子华南总代理西门子代理商:变频器
SIEMENS广东珠海市西门子变频器、PLC(授权)一级代理商——西门子华南总代理西门子代理商:变频器 SIEMENS广东肇庆市西门子变频器、PLC(授权)一级代理商——西门子华南总代理西门子代理商:变频器
SIEMENS广东肇庆市西门子变频器、PLC(授权)一级代理商——西门子华南总代理西门子代理商:变频器 SIEMENS广东揭阳市西门子变频器、PLC(授权)一级代理商——西门子华南总代理西门子代理商:变频器
SIEMENS广东揭阳市西门子变频器、PLC(授权)一级代理商——西门子华南总代理西门子代理商:变频器 SIEMENS广东清远市西门子变频器、PLC(授权)一级代理商——西门子华南总代理西门子代理商:变频器
SIEMENS广东清远市西门子变频器、PLC(授权)一级代理商——西门子华南总代理西门子代理商:变频器 SIEMENS广东韶关市西门子变频器、PLC(授权)一级代理商——西门子华南总代理西门子代理商:变频器
SIEMENS广东韶关市西门子变频器、PLC(授权)一级代理商——西门子华南总代理西门子代理商:变频器- SIEMENS广东阳江市西门子变频器、PLC(授权)一级代理商——西门子华南总代理西门子代理商:变频器







